测绘无人机采用RTK差分定位系统(可实现厘米级定位),这样也是为了加快作业效率。据介绍如果采用普通GPS定位,为了校正误差还需要派人去实地布设若干个像控点,而用了RTK则可以基本不用、或是只需要布设少量像控点。
一、什么是RTK及其作用
RTK(Real -time kinemaTIc)定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
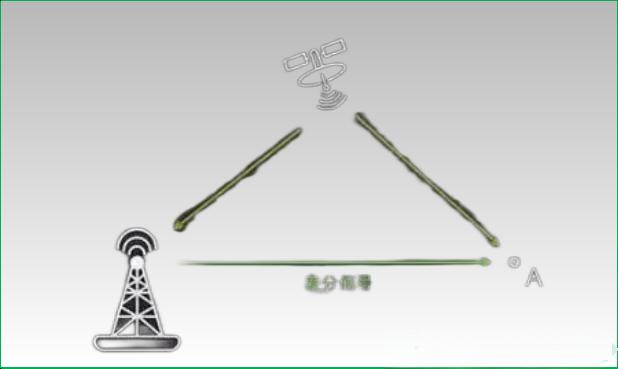
如上图所示,基站与A点的距离比较近,因此他们接收卫星信号时受到的大气层影响也基本接近,基站本身已知所处位置的坐标,在得到卫星信号提供的坐标之后与原数据做新差分,并将差分的结果告知A点,因此A点也可以得到高精度的结果。


二、RTK对于无人机的作用
在测绘和农业植保领域,大家都已经知道RTK能为无人机提高定位精度,降低飞行误差。
由于卫星信号的多路径效应以及大气中对卫星信号的折射和反射,当田地周边出现防风林或者天气环境影响时,卫星的定位精度就会降低,导致作业中的无人机出现航线偏移。
航线偏移存在一定的风险,在便用普通GPS进行定位,航线偏移的误差甚至可能达到10米左右,如果偏移量太大,将可能导致无人机撞上建构筑物、树林或者其他事故发生。因此这样的自主飞行并不能让人安心,也没有办法真正的解放操作员的双手,操作员仍需要全神贯注地盯着整个作业过程,随时准备救场。
通过下图我们先来了解一下GPS和RTK定位的其中一个特点:
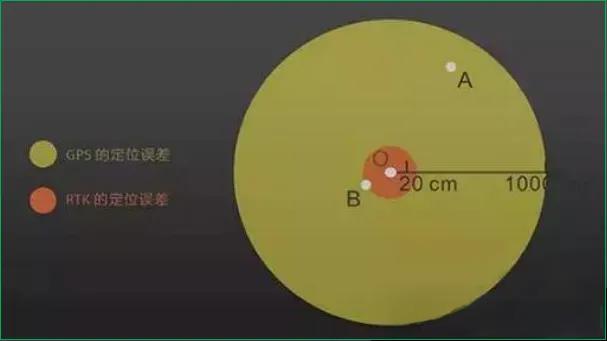
普通GPS的圆概率误差(CEP)有50%左右的概率在2.5米以内,另外50%的误差可能更大,甚至接近10米。上图中,当我们想要寻找O点的位置时,普通的GPS会告诉我们O点在A处,而A则是黄圈直径10米范围内的任意一个点。RTK通过实时差分技术,可以将范围缩小到10cm内。
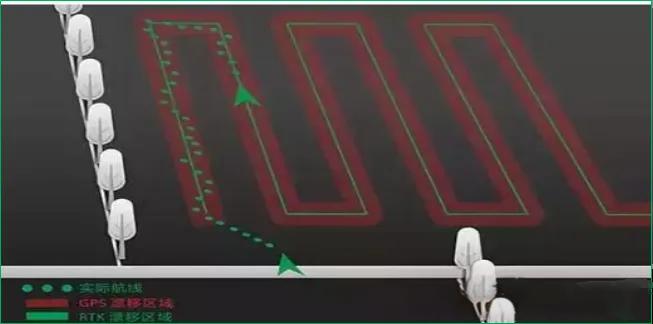
飞机在作业时获取到的航线坐标并不是一条直线,而是一个有宽度的区域,如果使用GPS定位进行航线作业,则区域的宽度在0-10米的范围内,此时飞机实际飞行的轨迹将会是一条歪歪扭扭的曲线,并且每一次飞行的曲线都不一致。
而使用RTK技术时,航线将是一个0-10厘米宽度的区域,与GPS相比,RTK基本等于是直线飞行,弯曲的幅度很小,因此效果将更均匀可控。
本内容为作者个人观点,不代表学测量网站立场.
如对本文有异议或投诉,联系bd@xueceliang.cn