无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。从技术角度定义可以分为:无人固定翼机、无人垂直起降机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。
无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。2013年11月,中国民用航空局(CA)下发了《民用无人驾驶航空器系统驾驶员管理暂行规定》,由中国AOPA协会负责民用无人机的相关管理。根据《规定》,中国内地无人机操作按照机型大小、飞行空域可分为11种情况,其中仅有116千克以上的无人机和4600立方米以上的飞艇在融合空域飞行由民航局管理,其余情况,包括日渐流行的微型航拍飞行器在内的其他飞行,均由行业协会管理、或由操作手自行负责。
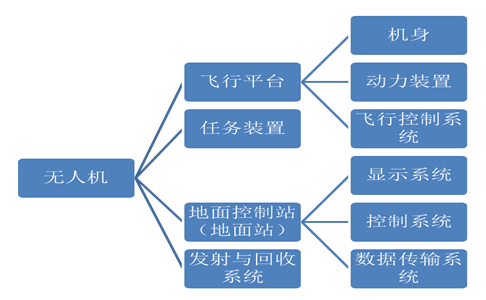
图 1
无人机的系统组成:
一、飞行平台(载机)
1.1机身
固定翼无人机机身一般由epp、epo、玻璃钢、木材等高强度低质量的材质构成。
多旋翼无人机机身一般由碳纤维材料作为主要材质。
1.2动力装置
固定翼多用无刷电动机、甲醇发动机、汽油机、涡扇发动机、涡喷发动机、(后两种多为军用)等作为动力装置。
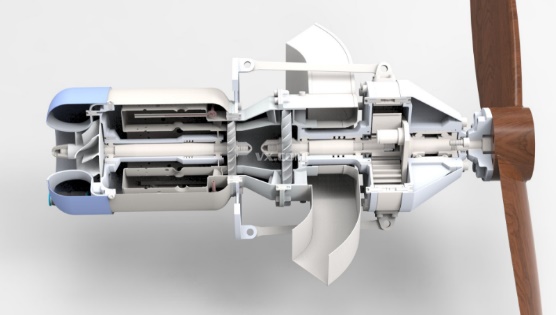
图 2

图 3

图 4

图 5
多旋翼无人机多用无刷电动机作动力装置。
无刷电动机
1.3飞控
飞控系统用于无人机的导航、定位和自主飞行控制,它由飞控板、惯性导航系统、GPS接收机、气压传感器、空速传感器等部件组成
飞控系统性能指标要求
a)飞行姿态控制稳度:横滚角应小于±3° 俯仰角应小于±3° 航向角应小于±3°
b) 航迹控制精度:偏航距应小于±20米、 航高差应小于±20米、 航迹弯曲度应小于±5°。
二、地面控制站(地面站)
1.系统构成
无线电遥控器、数传电台、增程天线、监控计算机系统、地面供电系统以及监控软件等组成。
a) 监控站主机应选用加固笔记本电脑、或同等性能的计算机和电子设备;
b) 监控数据可以图形和数字两种形式显示,显示做到综合化,形象化和实用化;
c) 无线电遥控器通道数应多于8个,以满足使用要求;

图 6 监控计算机系统

图 7 遥控

图 8 数传电台
d) 监控计算机应满足一定的防水、防尘性能要求,能在野外较恶劣环境中正常工作;
e) 监控计算机的主频、内存应满足监控软件对计算机系统的要求;
f) 电源供电系统应保障地面监控系统连续工作时间大于3小时。
四、发射与回收系统
1、起飞方式
滑跑起飞 优点:无需弹射器。缺点:场地限制。
弹射起飞 优点:没有场地限制。缺点:需要购置弹射器。

图 9发射与回收系统
2.降落方式:
滑跑回收
优点:无需回收降落伞。缺点:场地限制,安全性不如伞降。
伞降回收
优点:安全可靠,受场地制约影响小。缺点:需要降落伞以及飞控系统支持。

图 10 降落伞
来源:互联网
本内容为作者个人观点,不代表学测量网站立场.
如对本文有异议或投诉,联系bd@xueceliang.cn