01三维实景建模技术的兴起
近两年内,三维实景建模技术开始被人们所了解,逐渐应用在大型地址调查(三维地形重建)、考古、建筑复原等领域中。三维实景建模技术也称之为基于图像的三维重建。这项技术能够通过数学方法,并结合相机的一些基本原理,就可以仅仅通过上百张甚至几十张照片得到真实目标物体的三维模型。并且通过这种技术得到的三维模型在空间结构上与真实物体的非常相似,误差在严格的控制下甚至可以达到毫米级,接下来再以此为基础,进一步对模型进行修改完善,最终可以得到精确的数据,满足我们的需求。这种技术属于逆向建模的范畴,这打破了传统的三维模型制作(正向建模)和真实场景复原,提供了一个完全崭新的方法,应用前景广阔。
02传统建模的缺点
传统建模是建模人员通过平面图作为参考,用三维模型制作软件,根据个人经验从基础的三维几何体开始制作模型,不断调整,最终做出目标形态。这种方式存在许多局限:
(1)需要花费大量的时间。建模人员需要先读图,了解目标物体的大体结构以及细部结构,然后再根据图纸逐一的进行建模,这往往需要大量的工作时间。
(2)对建模人员的要求较高。需要建模人员对建模软件非常的熟悉,要想达到一定的水准往往需要有大量的实战经验和刻苦的训练。然而实际中我们需要制作的模型目标包罗万象,有可以结构简单,一些简单的几何体,也有可能结构复杂,比如一个人,一个复杂的曲面,这些不确定的目标类型对于建模人员来说是很大的考验,需要对建模软件全面的熟悉与运用。
(3)对于那些没有图纸的模型,只能凭建模人员的主观决定,模型的精细程度就完全得不到保证。因此这三点制约了传统建模快速实现三维模型重建的发展,我们需要找到一种更有优势建模技术。
03三维激光扫描技术的不足
为了适应发展,逆向建模技术应运而生,逆向建模就是根据现有的实体模型,通过工具设备获取其数据,然后在 3D 环境中重新生成其数字模型。现在很多单位纷纷开始使用三维激光扫描技术进行三维重建。虽然它在一定程度上满足了高精度复原的要求,但是也存在几个问题:
(1)是激光扫描设备对被扫描物体有着稍许限制,比如对于玻璃,水等透明物体往往不容易扫描。
(2)对被扫描物体的空间尺寸有限制,比如对大型物体进行扫描工作量会非常大,难度太大。因此这种手段还不能迅速普及。
04三维实景建模技术的优势
随着计算机运算能力的不断增强以及数字图像处理技术的高速发展,三维实景建模的技术开始进入各行业研究人员的视野,并取得了一系列实用化成果。三维实景建模是基于三维实景建模技术及其应用图像的三维重建,它是从单幅图像或图像序列中反求出物体的三维模型,它是相机拍摄照片的逆过程。虽然一幅图像上仅含二维信息,但是这些二维信息包括多幅图像中共同物体的物理特征及所对应的几何关系,和两幅图像中的视差关系。因此我们可以比较物体某一点在多幅相片中不同的位置,据此来计算该点的三维几何信息。这些二维信息是被拍摄物体本身所具有的。对于一些大地形,我们为了提高精度,我们需要在地形表面增加一些特殊标识作为辅助点,比如像控点。这有助于计算机更快的更好的分辨和处理这些二维信息。总之就是利用数字相机作为工具,综合运用图像处理技术,数学理论基础从二维图像中提取目标的三维空间信息,最终实现目标的三维重建。这种技术有很大的优势,体现在以下四个方面 :
(1)工作量大大减少:通过科学的正确的拍摄方法,能够快速的采集数据信息,然后再室内进行数据处理,可以很快的得到目标的三维模型。
(2)对建模人员要求不是很高:只要简单的熟悉拍摄技巧,以及数据处理的技巧,数天之内就可以上手。
(3)不受拍摄物体的形状、状态和尺寸所限制。
(4)不需要昂贵的设备:一般情况下只需要普通的数码相机就可以,如果拍摄大地形,大体积建筑物,我们可以使用无人机进行数据采集。这些优点很好的弥补了传统建模以及三维激光扫描仪存在的不足,注定了它将是今后三维建模的一个重要发展方向,其全自动或半自动建模特点和批量处理特点可以适用于多个行业。
05三维实景建模技术的应用
我们结合北盘江大桥工程实例来说明三维实景建模的具体应用。三维实景建模的技术运用主要分为两部分,一是对被拍摄物体的数据采集。二是后期对数据的处理和编辑。
我们通过无人机航测来采集数据,采集得到的数据是照片及照片的GPS坐标位置,因此对相机的要求和设置是非常关键的。因此相机在使用中应遵循以下原则:
(1)要使用尽量高的分辨率的数字相机。
(2)避免使用超宽角度和鱼眼镜头。最好的选择是 50mm 焦距 (35mm 胶片等效) 镜片。
(3)最好使用固定镜头。如果使用变焦镜头,焦距应设置最大或者最小值以使整个拍摄过程更稳定。
(4)使用格式转换器把照片JPG格式无损转换为 TIFF文件,因为JPG噪点太多。
(5)ISO 应该设置在100到400之间,否则高 ISO值会在图像中引起附加噪点。
(6)光圈值即F值设置在5. 6到8之间,使其能够快速的捕获,但同时要保证不能拍成模糊的照片。
(7)快门速度不能太慢,否则可能发生轻微的运动而导致模糊。
(8)尽量避免使用闪光灯。
(9)后期软件处理要用原图像进行操作,所以不要对原图像进行修剪,旋转和变换。否则可能出现处理失败或产生高度不准确的情况,需要注意的是光度法的修改不会影响重建结果。下面我们再来介绍一下在拍摄过程中的要求。拍摄照片时要提前做好计划,要做好一些几方面的准备:
①拍摄照片的数量:对于照片的数量要抱着宁愿多也不能少的原则。
②重合率:地理几何信息模型重建必须使照片具有重 合度,即 60%的纵向重叠率+80%的横向重合率。
③照像机组:三维模型重建将需要至少两个相机站并且有重叠的照片。如果只有一个相机站,那么可能只是得到类似全景图片的数据。本工程通过无人机航测得到180张照片,并且采用了6个像控点。

无人机飞行航线
下面到了第二部分软件处理这一环节。 这一部分我们使用 photoscan 这款软件,PhotoScan是一款基于影像自动生成高质量三维模型的软件。它基于最新的多视点三维重建技术,可以使用任意图像运作,而且照片可以在任何位置,但至少要在两张照片上可见,通过完全自动化图像对齐的方法来进行三维模型重建。Photoscan 照片处理的最终目标是打造一个纹理的3D模型。照片处理和三维模型的构建过程包括四个主要阶段。第一个阶段是相机对齐。在这个阶段 photoscan 搜索有关照片和匹配他们的共同点,以及它发现每个画面的摄像机的位置和改进相机标定参数。最后形成一个稀疏的点云和一组相机位置。稀疏的点云代表照片对齐的结果,不能直接用进一步的3d模型程序。然而,在外部程序下可以导出来进一步使用。下一阶段是建筑密集的点云。它是基于估计摄像机的位置和图片本身来建立密集的点云。密集的点可以被编辑和分类,然后可以被导出或者进一步生成3d网格模型。 第三阶段是建立网格,photoscan 基于密集的点云重建三维多边形网格来表示物体表面。另外它有一个方法仅仅基于稀疏点云的点云可以生成快速几何图形。photoscan 有两种算法可以应用于3d网格生成: 高度场-平面类型表面,任意-为任何类型的对象。建立网格后,可能根据一些需要对其进行编辑。通过 PhotoScan 进行一些修正,例如网格的增减、去除分离组件、关闭孔洞,测量体积面积等。对于更复杂的编辑,得使用外部的3D 编辑器。PhotoScan可以导出网格,通过另一个软件来编辑然后再将其导回。最后一个阶段是建立纹理。它有一般的通用纹理和正射影像。下面我们结合北盘江大桥工程具体进行操作:
(1)设置首选项。此选项在菜单栏工具选项的偏好设置中,可以通过设置首选项选择软件语言,模式改为浮雕,视差改为 1.0。在 OPenCL 栏里,勾选 OPenCL 设备,选择 3/4 的CPU 内核。在高级栏里项目压缩级别:6,勾选保持深度地图,在程序启动时检查更新,启用 VBO 支持。
(2)添加照片及坐标。 添加照片:这个步骤需要我们选择需要添加的照片,我们选择北盘江的180张照片,然后选择打开,添加到 photoscan 中。 添加坐标:我们首先需要从无人机黑匣子中读取这次飞行的数据,即这 180 张照片对应的坐标,高程,然后将其整理编辑导入 photoscan 中去。
(3)添加像控点及其坐标。在 photoscan 中,将六个像控点的位置在各自的图片及相关图片上找到,并确定。
(4)对齐照片。在菜单栏中工作流程选择对齐照片,在弹出的对话框中分别选择中精度,禁用,然后确定, photoscan 会计算相机位置和稀疏的点云数据的对齐方式。(添加标记点及位置坐标,提高精确度)。
(5)建立密集点云。在菜单栏中选择工作流程—建立密集点云,会弹出生成密集点云对话框,然后质量选择中,深度过滤选择进取。
(6)生成网格。在菜单栏中选择工作流程—建立网格,会弹出生成网格对话框,然后表面类型选择任意,源数据选择密集点云,面数选择中,差值选择启用的默认。
(7)生成纹理。在菜单栏中选择工作流程—生成纹理,会弹出生成纹理对话框,然后映射模式选择通用,混合模式选择马赛克。如下图 。
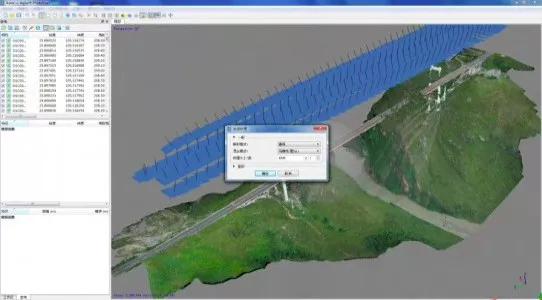
纹理图像
(8)编辑。将 photoscan 处理出来的模型经过外部编辑器编辑处理得到如下模型。

模型影像
到此为止,三维重建过程基本结束,经过和实际物体对照,模型主要结构误差为毫米级。从整个过程来看,人工参与度已经大大减少,时间也大大缩短,当然,对于整个模型来说仍有许多细部结构需要调整,有些拍摄不到的地方也难以处理,这就需要手工拍摄和无人机拍摄相结合的办法来解决这个问题。
来源:DPCloud
本内容为作者个人观点,不代表学测量网站立场.
如对本文有异议或投诉,联系bd@xueceliang.cn