后方交会是指仅在未知点上设站,向两个及以上已知点观测一个水平夹角α和水平距离L,从而计算未知点的坐标,称为后方交会。按条件划分可分为没有多余条件后方交会、有一个多余条件的后方交会和有两个多余条件的后方交会。
按测量方法区分:测角后方交会、测边后方交会、边角后方交会。
按精度划分:没有检查条件的后方交会(按测一边、一角,观测三角方向的测角后方交会,观测两边的测边后方交会);只有一个检查条件的(观测两边和夹角的后方交会,观测三个方向值和观测一边后方交会,观测四个方向的测角后方交会);精度较高的后方交会有(观测三个方向和其中两边的后方交会,观测三个方向值和三边的边角后方交会),下面通过边角后方交会作为基本介绍。
边角后方交会:是观测一个水平夹角α及测量对应的两条边长L,计算未知点坐标。它适用于道路、桥梁、隧道、涵洞。边角后方交会常出现在隧道开挖施工测量中,由于隧道作业面受空间限制,测量作业人员常受作业机械等物体遮挡,一般测量人员将控制点布设在隧道两侧(衬砌上面),通过全站仪任意点自由设站,后视两个或多个已知控制点计算待求点坐标,这种操作即不影响施工作业,也可以避免遮挡物带来的影响。
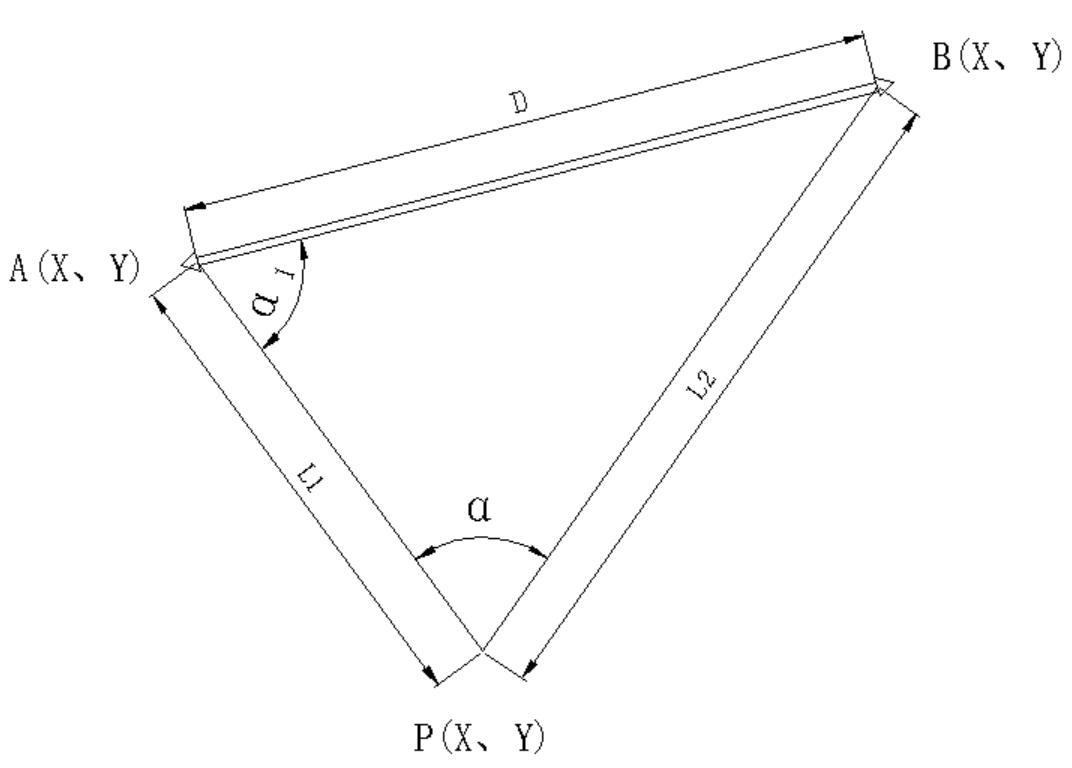
边角后方交会示意图
实例:
设已知控制点坐标A(X=3371514.173、Y=459856.1150),控制点坐标B(X=3370811.988、Y=460138.7470),边长L1=444.890m,边长L2=314.672m,水平夹角α=170°18’50”;
步骤:
将全站仪置镜于A、B两控制点外的任意点P;
照准控制点A测量距离L1及置HZ(水平方向归零);
照准控制点B测量距离L2及水平夹角α并记录。
原理:
用正弦定理求夹角α1,再根据坐标正算原理及夹角α1求出P点坐标。
公式:
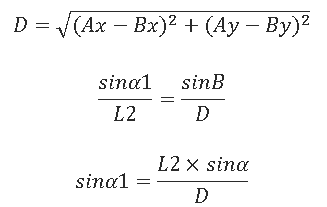
根据公式可得D:

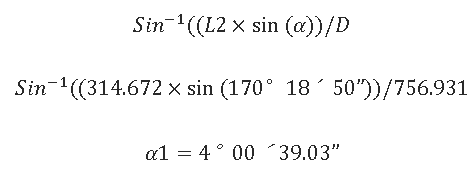
根据公式可得α1:
下一步,通过水平夹角α1,从而可求出控制点A点至待求点P点的直线方位角。
先根据A、B两已知控制点坐标求出A点至B点直线方位角。
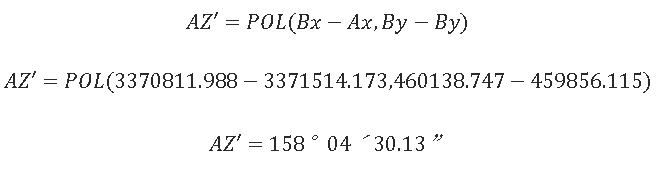
式中:POL为卡西欧计算器函数
再根据方位角A’加上水平夹角α1求出A点至P点的直线方位角
最后通过坐标正算原理可求出P点∆x,∆x,即可计算出P点坐标。
![]()
式中:REC为卡西欧计算器函数
计算结果:
P点坐标,即:
相关文章:
本内容为作者个人观点,不代表学测量网站立场.
如对本文有异议或投诉,联系bd@xueceliang.cn